



Projektseminar zum Robotereinsatz in Mietwohnungen Studie zum Smart-Home-Care-System

v.l.n.r.: Patrick Hieronymus (WI-Student), Dirk Neumann (WG Freiheit), Felix Scheinhardt (WI-Student), Karsten Helbig (Lehrstuhl WI und OR, MLU),
Prof. Dr. Taieb Mellouli (Lehrstuhl WI und OR, MLU), Dr. Patrick Jahn (Stabsstelle Pflegeforschung, UKH)
Die demografische Entwicklung Deutschlands führt zu einem Anstieg der Pflegebedürftigkeit und es eine der großen gesellschaftlichen Herausforderungen diesen Bedarf mit Fachkräften gerecht zu werden. Viele Pflegeleistungen durch professionelle Pflegefachkräfte oder auch Angehörige beziehen sich auf Aktivitäten im täglichen Leben und sind teilweise einfache Unterstützungsleistungen wie bspw. Bereitstellen der Medikamente oder Angebot von Essen und Trinken. Die Integration moderner Smart-Home-Technik in eine Art Smart-Home-Care-System stellt eine Möglichkeit dar diesen Pflegebedarf zu begegnen und die Selbständigkeit der Pflegebedürftigen zu erhöhen und auch den Verbleib in den eigenen vier Wänden zu ermöglichen. Zur Konzeption eines solchen Systems entstand im Wintersemester 2015/2016 eine Kooperation zwischen dem Lehrstuhl für Wirtschaftsinformatik und Operations Research der Martin-Luther-Universität Halle-Wittenberg, der Pflegeforschung des Universitätsklinikums Halle und der Wohnungsgenossenschaft Freiheit eG.
Übergeordnetes Ziel war es, ein System zu schaffen, welches für Senioren ein längeres selbstbestimmten Leben in den eigenen vier Wänden ermöglichen kann. Um dies Ziel zu erreichen müssen die bisherigen Funktionen von Smart-Home-Techniken, wie das Sammeln von Daten (z.B. über den Gesundheitszustand) oder die Fernsteuerung einzelner Gegenstände, um die Möglichkeit physische Veränderungen im Wohnungsumfeld herbeiführen zu können erweitert werden.
Im Rahmen eines studentischen Projektseminars wurde der Einsatz von Robotern zur technischen Realisierung dieser Anforderung untersucht.
Auf theoretischer Ebene wurde der gegenwärtigen Entwicklungsstands auf dem Gebiet des Robotereinsatzes in der häuslichen Pflege untersucht. Darauf aufbauend wurden Szenarien für den Einsatz von Robotern im häuslichen Umfeld identifiziert. Die praktische Umsetzung erfolgte in der Modellwohnung zum Wohnen mit Demenz der WG Freiheit mit Hilfe eines Lego Roboters. Implementiert wurde eine selbständige Navigation des Roboters über ein Liniensystem, eine Sprach Ein- und Ausgabe sowie die Möglichkeit der Fernsteuerung des Roboters über ein Web-Interface. Durch die Implementierung dieser Features konnten die folgenden Szenarien umgesetzt werden:
- Unterstützung bei Strukturierung des Alltags durch Erinnerungsfunktionen, Wecker und Videofunktionalitäten
- Hol- und Bringetätigkeiten von Medikamenten, eines Tabletts oder anderen Gegenständen entweder automatisch, oder nach sprachlicher Aufforderung
- Interaktion (z.B. Auffinden in der Wohnung, Motivation zur Bewegung, Festellen des aktuellen Befindens) einer Pflegekraft mit dem Patienten ohne physische Anwesenheit
Im Fazit des Projekts ist eine zielgerichtete Alltagsunterstützung im häuslichen Umfeld mit Hilfe eines Roboters softwaretechnisch realisierbar. Die Navigation über ein Liniensystem ist einfach möglich. Die Möglichkeit der Fernsteuerbarkeit eröffnet eine Vielzahl von Interaktionsmöglichkeiten seitens der Pflegefachkräfte und der Angehörigen. Eine Integration des Roboters in ein umfassendes Smart-Home-Care-System, welches weitere smarte Gegenstände (z.B: Smarte Glühbirnen, die je nach bedarf eine anderes visuelles Raumklima erzeugen können) in einer Wohnung steuern kann, bietet weiteres Potential aus pflegerischer Sicht.
Für die hardwareseitige Realisierung können kleine flexibel Konfigurierbare und kostengünstig erwerbbare Roboter sinnvoll eingesetzt werden. Eine praktische Realisierung unter Verwendung eines Lego-Roboters ist aufgrund der starken Einschränkundgen in Leistungsfähigkeit der Motoren, Zuverlässigkeit des Steuermoduls und Belastbarkeit lediglich im eingeschränkten Rahmen einer Machbarkeitsstudie sinnvoll.
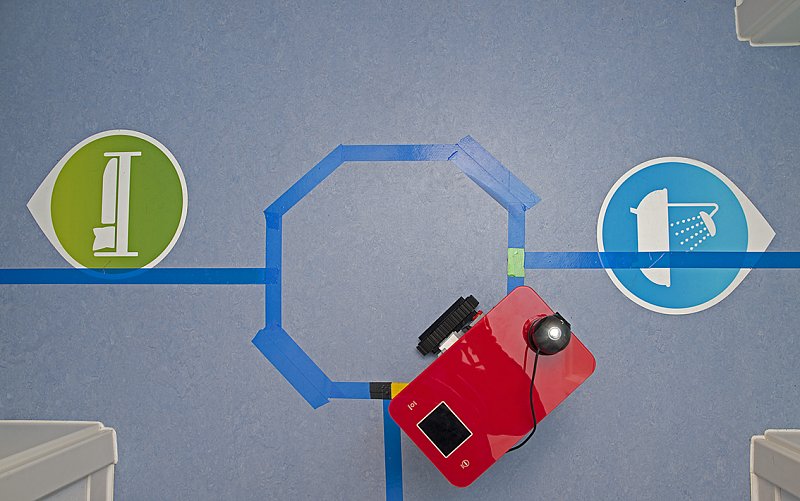
Roboter unterwegs auf Leitlinien (Foto: UKH)

Roboterkonzept (Foto: UKH)

Work in Progress (Foto: UKH)